Dijkstra算法
全局路径规划算法——Dijkstra算法.
Dijkstra算法
基本概念
典型最短路径算法。
从一个节点遍历其余各节点的最短路径算法,解决的是有权图中最短路径问题,它的主要特点是以起始点为中心向外层扩展(广度优先遍历思想),直到扩展到终点为止。
算法思想
点集S:记录已求出最短路径的节点(以及相应的最短路径长度)
点集U:记录还未确定最短路径的节点(以及该节点到起点D的距离)
- 初始时,数组S中只有起点D,而数组U中是除起点D之外的节点集合,并且数组U中记录各节点到起点D的距离。如果节点与起点D不相邻,距离设为无穷大。
- 然后,从数组U中找出路径最短的节点K,并将其加入到数组S中;同时,从数组U中移除节点K。接着,更新数组U中的各节点到起点D的距离。
- 重复,直到遍历完所有节点。
算法图解
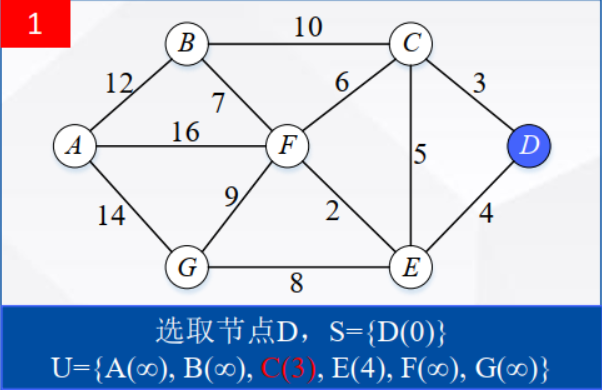
- 初始时,S只包含起点D;U包含除D外的其他节点,且U中节点的距离为起点D到该节点的距离,如果该节点与起点D不相邻,距离为无穷大。
- 从U中选出距离最短的节点C,并将节点C加入到S中;同时,从U中移除节点C。然后,更新U中各个节点到起点D的距离。
$~~~~$之所以更新U中节点的距离,是由于确定了C是求出最短路径过程中的节点,从而可以利用C来更新其它节点的距离;因为起点D到节点v的距离(D,v)可能大于(D,C)+(C,v)的距离。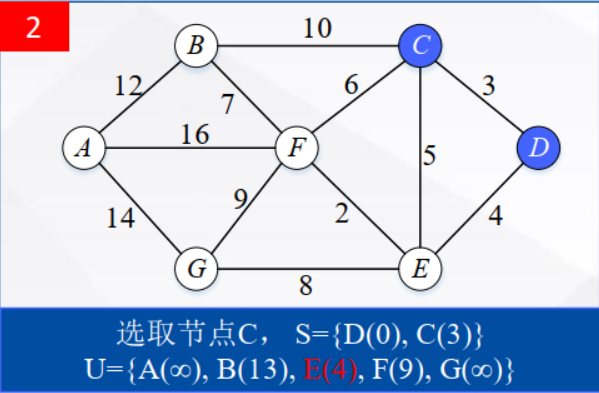
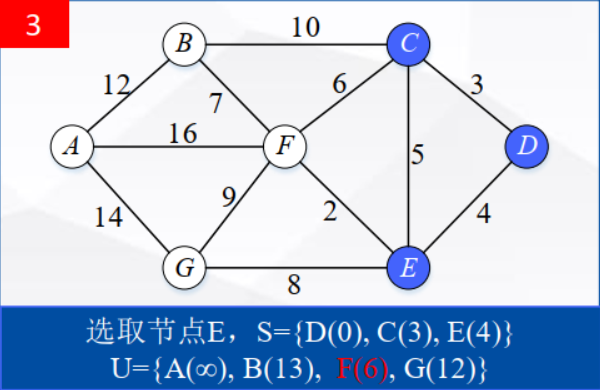
- 选取节点E,将E加入到S中,同时更新U中节点的距离。以节点F为例,之前F到D的距离为9;但是将E加入到S之后,F到D的距离为6=(F,E)+(E,D)。
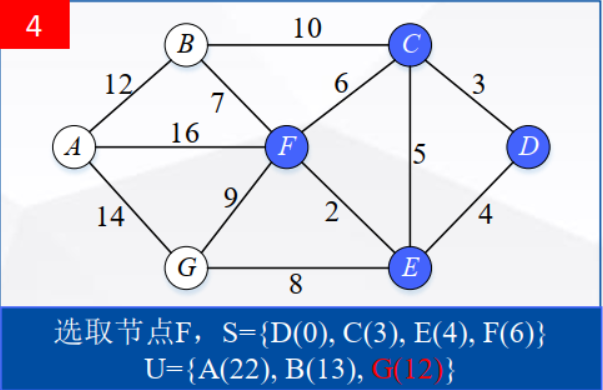
- 将节点F加入到S中,同时更新U。
- 将节点G加入到S中,同时更新U。
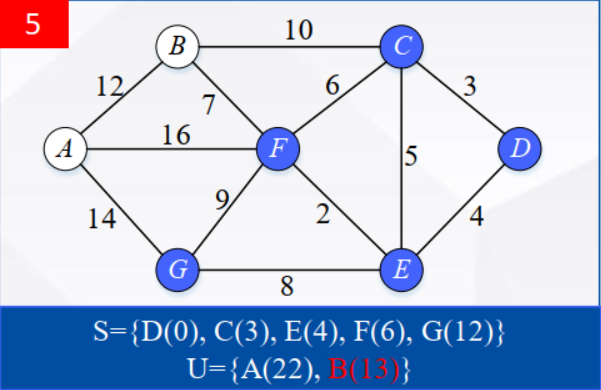
- 将节点G加入到S中,同时更新U。
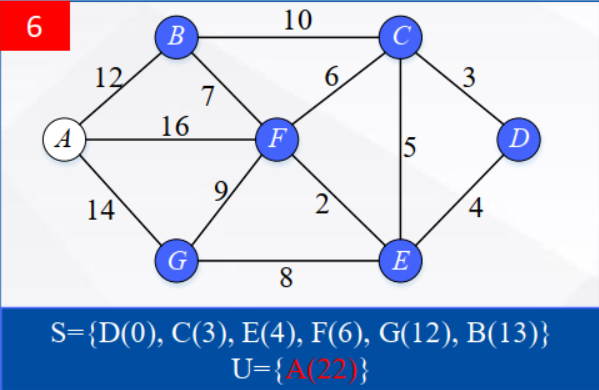
- 将节点A加入到S中,同时更新U。
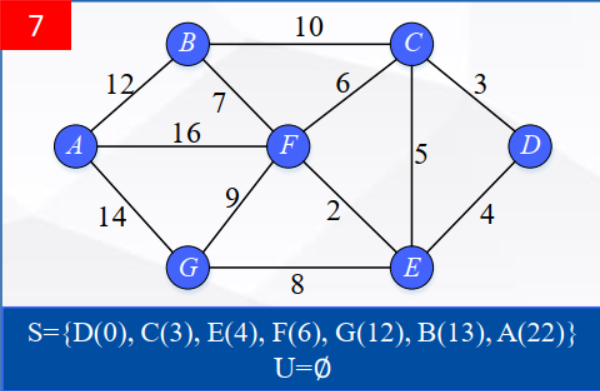
此时,起点D到各个节点的最短距离就计算出来了:A(22) B(13) C(3) D(0) E(4) F(6) G(12)。 - 最后
D->A的最优路径为D->E->F->A.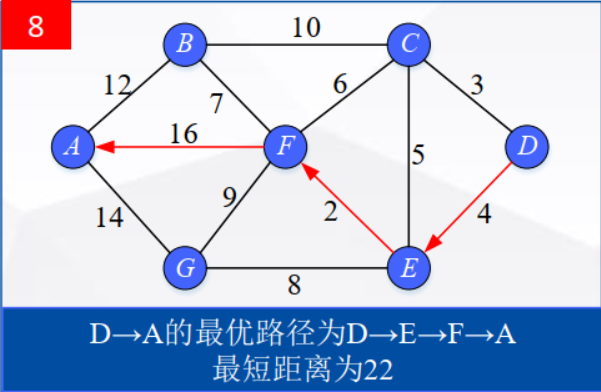
代码实现
S中每增加一个数据时(V1),判断、更新U(Source->V1->Vn)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
int *dijkstra_alg(int **a, int Source, int col)
{
int *dist = calloc(col, sizeof(int));
bool *visited = calloc(col, sizeof(bool));
for (int i = 0; i < col; i++)
{
dist[i] = INT_MAX;
visited[i] = false;
}
dist[Source] = 0;
int index = 0, u = 0;
for (int coun = 0; coun < col; coun++)
{
int min = INT_MAX;
for (int i = 0; i < col; i++)
if (!visited[i] && dist[i] <= min)
{
min = dist[i];
index = i;
}
u = index;
visited[u] = true;
for (int i = 0; i < col; i++)
if (!visited[i] && a[u][i] != INT_MAX && dist[u] != INT_MAX &&
(dist[u] + a[u][i] < dist[i]))
dist[i] = dist[u] + a[u][i];
}
return dist;
}
This post is licensed under CC BY 4.0 by the author.